












「ロボットをCANopenで制御する」と聞くと、なんだか難しそう…と感じていませんか? 産業用ロボットの世界は奥深く、様々な通信プロトコルが存在します。その中でもCANopenは、その柔軟性と堅牢性から、多くのロボットシステムで採用されています。しかし、実際にCANopenでロボットを制御しようとすると、専門的な知識や経験が必要となり、多くのSIer(システムインテグレータ)の方々が課題に直面しているのも事実です。
この記事では、CANopenの基礎から、ロボット制御における具体的な活用方法、そしてSIerが陥りやすい落とし穴まで、徹底的に解説します。CANopenの知識があまりない方でも、読み進めていくうちに、CANopenの魅力と可能性を感じていただけるはずです。さあ、CANopenの世界へ、一緒に飛び込んでみましょう!
この記事を通して、CANopenの知識を深め、ロボットシステム構築のスキルアップを目指しましょう。具体的には、
- CANopenの基本的な概念とメリットを理解する
- ロボット制御におけるCANopenの活用事例を知る
- SIerがCANopen導入時に注意すべきポイントを把握する
- CANopenを用いたロボットシステム構築の具体的なステップを学ぶ
これらを通して、読者の皆さんがCANopenを活用したロボットシステム構築をスムーズに進められるようになることを目指します。
CANopenって一体何?ロボット制御に欠かせない理由を解き明かす
CANopenは、産業用ネットワークの標準規格の一つで、特に組み込みシステムで広く利用されています。その最大の特徴は、柔軟性と拡張性の高さです。異なるメーカーのデバイス同士でも、CANopenの規格に準拠していれば、相互に通信し、連携することができます。これは、ロボットシステムのように、様々な機器が組み合わさって動作するシステムにおいては、非常に重要なメリットとなります。
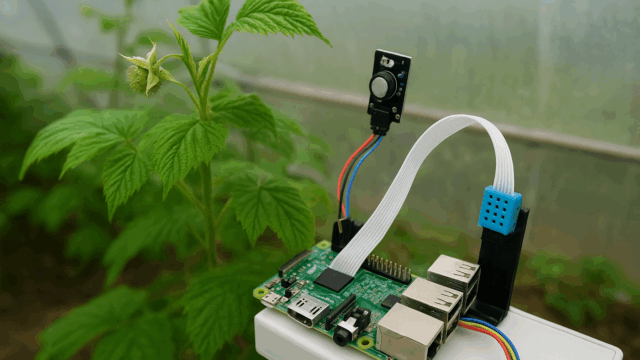
ロボット制御におけるCANopenの役割は多岐に渡ります。例えば、ロボットアームの各軸のモーター制御、センサーからの情報収集、PLC(プログラマブルロジックコントローラ)との連携など、様々な用途で活用されています。CANopenを使用することで、システム全体の設計がシンプルになり、開発期間の短縮やコスト削減にも繋がります。
また、CANopenは、リアルタイム性に優れているという特徴も持っています。ロボット制御においては、ミリ秒単位での正確な制御が求められることが多いため、CANopenのリアルタイム性は非常に重要です。CANopenを使用することで、高速かつ正確なロボット制御を実現することができます。
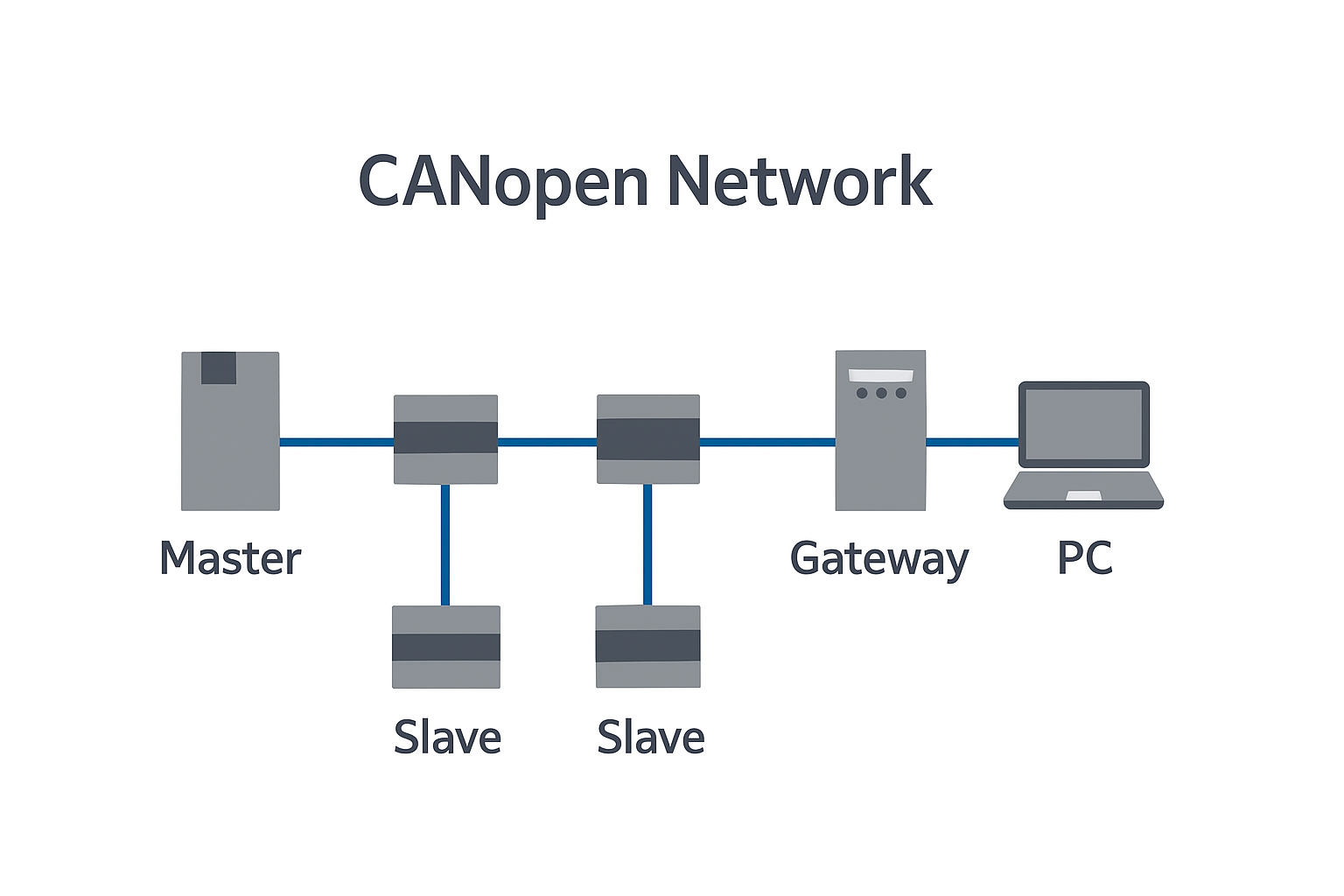
 提案画像: CANopenネットワークの構成図。ロボットアーム、PLC、センサーなどがCANopenバスで接続され、データがやり取りされている様子を示す。
提案画像: CANopenネットワークの構成図。ロボットアーム、PLC、センサーなどがCANopenバスで接続され、データがやり取りされている様子を示す。
さらに、CANopenは、エラー検出機能も充実しています。通信エラーが発生した場合、迅速にエラーを検出し、システムを安全な状態に移行させることができます。これは、ロボットシステムのような、安全性が重要なシステムにおいては、非常に重要な機能となります。CANopenを使用することで、安全で信頼性の高いロボットシステムを構築することができます。
CANopenの導入には、専門的な知識が必要となる場合もありますが、そのメリットは非常に大きいです。ロボットシステムをより効率的に、より安全に、そしてより柔軟に制御するために、CANopenは欠かせない存在と言えるでしょう。
SIerが直面するCANopen導入の壁とその突破口
CANopenは非常に強力な通信プロトコルですが、SIerが実際にロボットシステムに導入する際には、様々な課題に直面することがあります。その中でも、特に多いのが、CANopenの専門知識不足、異なるメーカーのデバイス間の互換性問題、そして、システム全体の設計の複雑さです。
CANopenは、様々な設定項目やパラメータが存在するため、専門的な知識がないと、適切な設定を行うことができません。また、異なるメーカーのデバイス同士をCANopenで接続する場合、互換性の問題が発生することがあります。各メーカーがCANopenの規格を独自に解釈している場合や、デバイスの設定が異なっている場合などが考えられます。これらの問題を解決するためには、各デバイスの仕様を詳しく理解し、適切な設定を行う必要があります。
さらに、ロボットシステム全体の設計が複雑になることも、SIerが直面する課題の一つです。CANopenで制御するデバイスが増えるほど、ネットワークの構成が複雑になり、システム全体のデバッグやメンテナンスが難しくなります。このような問題を解決するためには、システム全体の設計を慎重に行い、各デバイスの役割を明確に定義する必要があります。
 提案画像: SIerがCANopenの設定ツールを使用し、デバイスの設定を行っている様子。複雑なパラメータ設定画面が表示されている。
提案画像: SIerがCANopenの設定ツールを使用し、デバイスの設定を行っている様子。複雑なパラメータ設定画面が表示されている。
これらの課題を解決するためには、CANopenに関する専門知識を習得し、様々なメーカーのデバイスに関する情報を収集し、そして、システム全体の設計能力を高める必要があります。また、CANopenの導入を支援するツールやサービスを活用することも有効です。例えば、CANopenの設定を自動化するツールや、異なるメーカーのデバイス間の互換性を検証するサービスなどが存在します。これらのツールやサービスを活用することで、CANopenの導入をよりスムーズに進めることができます。
CANopenの導入は決して簡単な道のりではありませんが、これらの課題を乗り越えることで、ロボットシステムの性能を大幅に向上させることができます。SIerの皆様には、CANopenの導入に積極的に挑戦し、ロボットシステムの可能性を最大限に引き出していただきたいと思います。
CANopenロボットシステム構築!成功のためのステップバイステップガイド
CANopenを用いたロボットシステム構築を成功させるためには、計画的なアプローチが不可欠です。ここでは、具体的なステップを追いながら、SIerの皆様がスムーズにCANopenロボットシステムを構築できるよう、詳細なガイドを提供します。
**ステップ1:要件定義とシステム設計**
まず、ロボットシステムに求められる要件を明確に定義します。どのようなタスクをロボットに実行させるのか、どの程度の精度や速度が必要なのか、どのような環境で使用するのかなど、具体的な要件を洗い出します。次に、これらの要件に基づいて、システム全体の設計を行います。CANopenで制御するデバイスの種類や数、ネットワークの構成、データの流れなどを決定します。この段階で、各デバイスの仕様を詳しく調査し、互換性の問題がないことを確認することが重要です。
**ステップ2:デバイスの選定とCANopen設定**
システム設計に基づいて、CANopenに対応したデバイスを選定します。各デバイスの性能や価格、信頼性などを比較検討し、最適なデバイスを選びます。デバイスを選定したら、CANopenの設定を行います。各デバイスのノードID、ボーレート、PDO(Process Data Object)の設定など、CANopenのパラメータを適切に設定する必要があります。CANopenの設定ツールを使用することで、設定作業を効率化することができます。
**ステップ3:ネットワーク構築とテスト**
CANopenネットワークを構築します。CANopenバスケーブルで各デバイスを接続し、ターミネータを取り付けます。ネットワークを構築したら、通信テストを行います。各デバイスが正常に通信できることを確認します。通信エラーが発生した場合は、ケーブルの接続やデバイスの設定を見直します。CANopenアナライザーを使用することで、通信状況を詳細に分析し、エラーの原因を特定することができます。
 提案画像: ロボットシステム全体図。ロボットアーム、コントローラ、周辺機器などがCANopenネットワークで接続され、連携して動作している様子を示す。
提案画像: ロボットシステム全体図。ロボットアーム、コントローラ、周辺機器などがCANopenネットワークで接続され、連携して動作している様子を示す。
**ステップ4:アプリケーション開発と統合**
ロボットを制御するためのアプリケーションを開発します。CANopenライブラリを使用することで、CANopen通信を簡単に扱うことができます。アプリケーションを開発したら、システム全体を統合します。各デバイスが連携して動作することを確認します。動作テストを行い、システムが要件を満たしていることを検証します。
**ステップ5:デバッグと最適化**
システムにバグがないかを確認し、デバッグを行います。動作中にエラーが発生した場合は、エラーログを分析し、原因を特定します。CANopenアナライザーを使用することで、CANopen通信を監視し、エラーの原因を特定することができます。デバッグが完了したら、システムのパフォーマンスを最適化します。CANopenのパラメータを調整したり、アプリケーションのコードを最適化したりすることで、システムのパフォーマンスを向上させることができます。
これらのステップを着実に実行することで、CANopenを用いたロボットシステム構築を成功させることができます。CANopenは、ロボットシステムの可能性を大きく広げる強力なツールです。ぜひ、積極的に活用し、革新的なロボットシステムを開発してください。
CANopenで広がるロボットシステムの未来
CANopenは、ロボットシステムの可能性を大きく広げる、非常に強力なツールです。その柔軟性とリアルタイム性、そして信頼性の高さから、様々な分野で活用されています。例えば、製造業においては、工場の自動化ラインにおけるロボット制御にCANopenが利用されています。高速かつ正確な制御により、生産効率の向上に貢献しています。また、医療分野においては、手術支援ロボットやリハビリテーションロボットの制御にCANopenが利用されています。高い安全性と信頼性により、患者の負担を軽減し、治療効果を高めることに貢献しています。
さらに、物流分野においては、倉庫内の搬送ロボットやピッキングロボットの制御にCANopenが利用されています。効率的な搬送と正確なピッキングにより、物流コストの削減に貢献しています。そして、農業分野においては、農作業ロボットや収穫ロボットの制御にCANopenが利用されています。人手不足の解消と生産性の向上に貢献しています。
これらの事例からもわかるように、CANopenは、様々な分野でロボットシステムの発展に貢献しています。そして、今後、AI(人工知能)やIoT(Internet of Things)などの技術との融合により、CANopenの可能性はさらに広がっていくと考えられます。例えば、AIを活用したロボット制御においては、CANopenで収集したデータをAIが分析し、ロボットの動作を最適化することができます。これにより、より高度な自動化や自律化を実現することができます。また、IoTを活用したロボットシステムにおいては、CANopenで制御するロボットをインターネットに接続し、遠隔監視や制御を行うことができます。これにより、より柔軟な運用やメンテナンスを実現することができます。
CANopenは、ロボットシステムの未来を切り開く鍵となる技術です。SIerの皆様には、CANopenの可能性を最大限に引き出し、革新的なロボットシステムを開発していただきたいと思います。そして、CANopenを通じて、社会の発展に貢献していただきたいと思います。
この記事では、CANopenの基礎からロボット制御への応用、SIerが直面する課題とその解決策、そして将来展望まで、幅広く解説しました。CANopenは、確かに複雑なプロトコルですが、その潜在能力は計り知れません。この記事が、皆様のCANopen活用の一助となれば幸いです。
CANopenに関する知識をさらに深めたい方、具体的な導入事例についてもっと詳しく知りたい方は、ぜひお気軽にお問い合わせください。皆様のロボットシステム構築を全力でサポートいたします。CANopenを活用して、未来を切り開くロボットシステムを共に創り上げましょう!

