












近年、車や産業機械、さらには家庭用機器に至るまで「つながる」ことが当たり前になりつつあります。その中心にあるのが組み込みソフトウェアです。特に自動車の分野では、エンジン制御、ブレーキシステム、電動化技術に至るまで、複数のECU(Electronic Control Unit)がCAN(Controller Area Network)を介してやり取りをしています。日常生活でハンドルを切るたびに、見えないところでCAN通信が活躍していると考えると、少しワクワクしませんか?普段は意識されない仕組みだからこそ、理解しておくと安心感が増し、開発に関わる人にとっては大きな武器になります。
この記事では、最新のCANドライバー技術をわかりやすく解説し、実践的な活用法を紹介していきます。
記事の狙いと学べること
本記事の目的は、組み込みソフトにおけるCANドライバーの基礎から最新の実装手法までを網羅的に理解できるようにすることです。CAN通信がなぜ重要なのか、どんな進化を遂げてきたのか、さらに実際のプロジェクトでどう応用できるのかを具体例を交えながら掘り下げます。読むことで「CAN通信って難しそう」という気持ちから、「自分も扱える!」という自信に変えていただくことを目指します。
CAN通信の仕組みとドライバーの役割を解き明かす
CANは1980年代にBosch社によって開発され、以来、自動車業界を中心に標準的な通信規格となりました。その強みは「堅牢性」と「リアルタイム性」です。車のブレーキ信号やエンジン制御といったミリ秒単位で処理が必要な情報を、複雑なネットワーク環境でも効率よく伝達できます。
では、CANドライバーはどのような役割を担うのでしょうか。簡単に言えば、アプリケーション層とハードウェア層の橋渡し役です。アプリケーションが「このメッセージを送信したい」と指示すると、CANドライバーは適切なフォーマットに変換し、バスに流します。逆に、受信した信号を正しく解釈してアプリケーションに届けるのもドライバーの仕事です。もしCANドライバーがなければ、ソフトウェア開発者はハードウェア寄りの詳細なレジスタ操作まで行わなければならず、開発効率は大幅に低下します。
近年では「CAN FD(Flexible Data-rate)」の普及が進み、1フレームあたりのデータ量が従来の8バイトから最大64バイトへ拡張されました。これにより、自動運転支援や高度な診断機能といった新しい領域でも活用が広がっています。こうした進化に対応できるドライバーを使いこなすことが、次世代の開発には欠かせません。
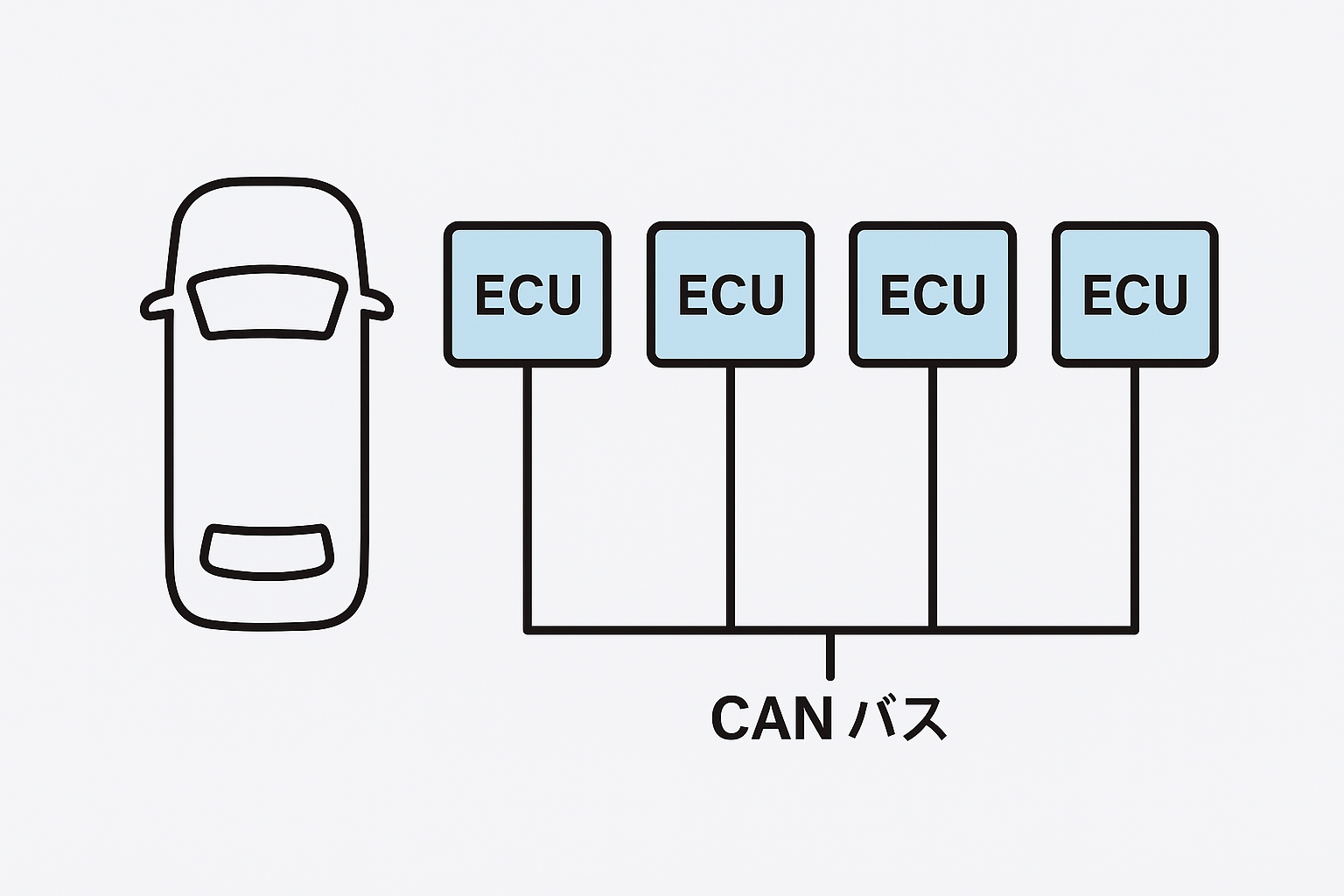 提案画像: 車載ネットワークの概念図で、複数のECUがCANバスに接続されて相互通信している様子
提案画像: 車載ネットワークの概念図で、複数のECUがCANバスに接続されて相互通信している様子
実践で役立つCANドライバー活用のポイント
実際にCANドライバーを導入・利用する際には、いくつかのポイントを押さえておくことが重要です。
まずは「メッセージ設計」です。CAN通信ではID(識別子)がメッセージの優先度を決めます。たとえば衝突回避ブレーキの信号とエアコン操作の信号では、当然ながら前者が優先されるべきです。そのため、ID割り当てを誤るとシステム全体の信頼性が損なわれます。実際にあるプロジェクトでは、優先度の設計を見直しただけで通信遅延が30%改善された事例もあります。
次に「エラーハンドリング」。CANバスは複数のノードが同時に通信するため、衝突やエラーが発生します。ドライバーには自動リトライやエラーカウンタの仕組みが組み込まれており、異常が一定回数を超えると「バスオフ」という状態になって自動的に通信から切り離されます。これを正しく扱わないと、予期せぬ機能停止につながります。開発現場では、テストベンチでわざとエラーを発生させ、リカバリーが正しく動作するか確認することがよく行われます。
さらに「診断機能」の活用も欠かせません。OBD-IIなどの診断規格に準拠することで、故障時に整備士が状況を即座に把握でき、ユーザー体験の向上にもつながります。
 提案画像: CAN信号の波形やメッセージIDのやり取りを可視化した解析ツールの画面イメージ
提案画像: CAN信号の波形やメッセージIDのやり取りを可視化した解析ツールの画面イメージ
未来を見据えたCANドライバーの進化と応用
CAN通信は古くから使われてきた技術ですが、今も進化を続けています。CAN FDに加え、Ethernetとのハイブリッド化が進み、大容量データのやり取りを担う領域ではEthernet、小さな制御信号を扱う領域ではCANといった使い分けが一般化しつつあります。
また、自動運転時代に向けてセキュリティ強化も必須です。CANバスは本来、セキュリティを強く意識して設計されたものではありません。そこで暗号化やメッセージ認証コードを付与する取り組みが進んでいます。最近では、ハードウェアセキュリティモジュール(HSM)と組み合わせて安全性を高める開発も増えており、従来の「シンプルさ」と「堅牢さ」を維持しつつ、脅威に対応できる仕組みが整えられつつあります。
さらに産業機械や農業機械など、自動車以外の分野にも応用が広がっています。例えば大型トラクターでは、CANを使ってエンジン、GPS、作業機の制御を連携させ、効率的な農作業を実現しています。このようにCANは「車の中だけの技術」ではなく、IoT時代全般を支える重要な基盤となっているのです。
 提案画像: 自動車と産業機械がCAN通信で連携し動作しているシーンを俯瞰的に描いたイラスト
提案画像: 自動車と産業機械がCAN通信で連携し動作しているシーンを俯瞰的に描いたイラスト
まとめ:CANを理解することが開発の未来を変える
ここまで見てきたように、CANドライバーは単なる通信の橋渡しではなく、安全性や信頼性を支える要の技術です。ID設計からエラーハンドリング、診断機能の活用に至るまで、現場で役立つ知識を押さえることは、開発の質を飛躍的に高めます。さらにCAN FDやセキュリティ強化、Ethernetとの連携など、新しいトレンドを意識すれば、未来のプロジェクトでも即戦力になれるでしょう。
CANは40年以上の歴史を持ちながら、いまなお進化を続けています。それは「古いから使いにくい」のではなく、「成熟して信頼できるうえに、新しい要素も柔軟に取り入れられる」という強さを意味します。組み込みソフト開発に関わる人ならば、避けて通れない分野であることは間違いありません。
今こそCANドライバーを学び、実践へ
もし「CAN通信は難しそう」と感じているなら、まずは小さな実験から始めてみましょう。評価ボードやオープンソースのCANスタックを活用すれば、低コストで実践的な体験ができます。そこから得られる知見は、きっと実務に大きく役立つはずです。
この記事を読んだ今が、学び始める最高のタイミングです。未来のプロジェクトで自信を持ってCANドライバーを扱えるように、今日から一歩踏み出してみませんか?あなたのスキルアップが、次の時代のモビリティやIoTを支える力になるはずです。
